




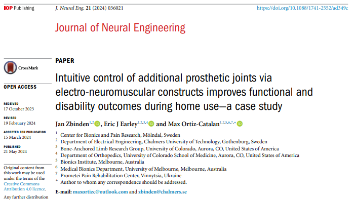
Bone-anchored limbs have gained significant interest over the past decade for their numerous advantages over traditional socket-suspended prostheses. When combined with neuromuscular implants and surgical reconstruction, robust control over numerous joints of the prosthetic arm and hand become possible in ways that are typically inaccessible using traditional myoelectric interfaces.
Through my postdoctoral work with the Center for Bionics & Pain Research, and my current work with the Bone-Anchored Limb Research Grooup, my colleagues and I have focused on maximizing functionality by improving upon the skeletal and neural interfaces, developing new diagnostics more capable of monitoring the integrity of implanted hardware, and building a greater knowledge of the interaction between bone-anchored prostheses and the prescription of prosthetic components to patients.


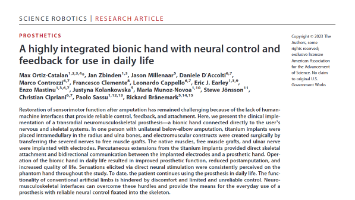
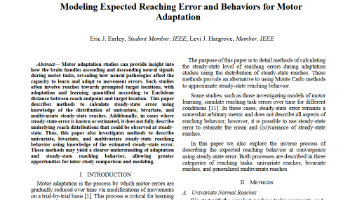
Sensory feedback is an integral part of how we learn and refine new motor skills and perform motor tasks, but is significantly deteriorated after amputation. There is great interest in the field to restore this sensory feedback for prosthetic limbs, however this must be done in a way that provides true functional benefits; even with no direct sensory feedback, we use incidental sources of feedback such as sight and sound to "fill in the gaps," so any artificial feedback must provide benefit on top of this incidental feedback.
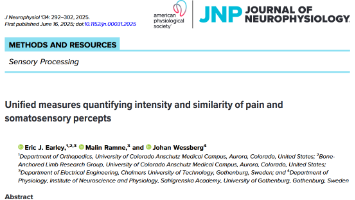
Throughout my PhD work at Shirley Ryan Ability Lab's Center for Bionic Medicine, I investigated how incidental and artificial feedback interact and proposed kinesthetic feedback paradigms which improve prosthesis control even alongside incidental feedback. Later, during my postdoctoral work at the Center for Bionics & Pain Research, my students and I investigated how changes to direct peripheral nerve stimulation affect the intensity and quality of elicited sensations, proposed novel methods of characterizing and tracking somatosensory percepts, and developed algorithms to remove stimulation signal artifacts from EMG signals used to control the prosthesis.

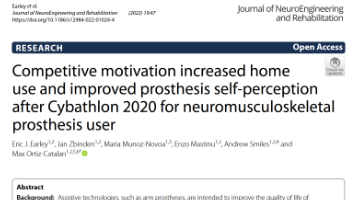
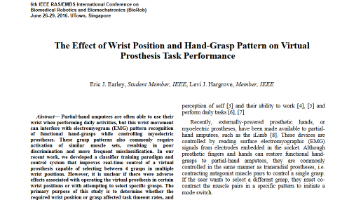
One major challenge for modern prosthetics is the successful translation of technology from the lab into the home. Many outcome measures exist to capture improvements in prosthetic technology, however each has limitations and often are not representative of how the prosthesis will be used in daily life.
My interest in this area is two-fold: first, to develop new outcomes measures which may be easier to integrate clinically or are more hollistic in their evaluation of prosthesis functionality; and second, to utilize data collected from patients using their prostheses naturally in their daily lives to draw insights into the benefits of novel prosthetic technologies.
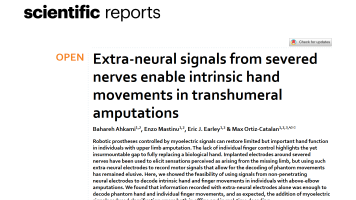
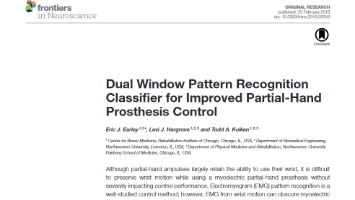
Robust and responsive myoelectric control is a critical element of maximizing functionality for prosthetic limbs. Improving this myoelectric control can take many forms, from developing improvements to the classification algorithms to performing surgical interventions to increase the number of available neural signals.
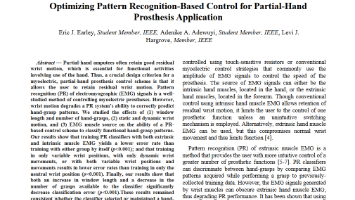
During my Master's research at the Center for Bionic Medicine, I focused on improving the robustness of control over prosthetic fingers for individuals with partial-hand amputation. Later during my postdoc at the Center for Bionics & Pain Research, my colleagues and I sought to maximize the use of neural outputs directly from the nerves and muscles of individuals using a neuromusculoskeletal prosthesis.

© 2026 Eric J. Earley | All Rights Reserved
